
Parc éolien offshore en Bretagne sud : "une catastrophe" pour Stéphanie Doyen la maire de Saint-Pierre-Quiberon
Les maires de la presqu'ile de Quiberon, de Groix et Belle-Ile sont vent debout contre le projet d'é
Les maires de la presqu'ile de Quiberon, de Groix et Belle-Ile sont vent debout contre le projet d'é

Portée par le Centre de Gestion de la Nièvre et financée par France Travail, la formation de secréta
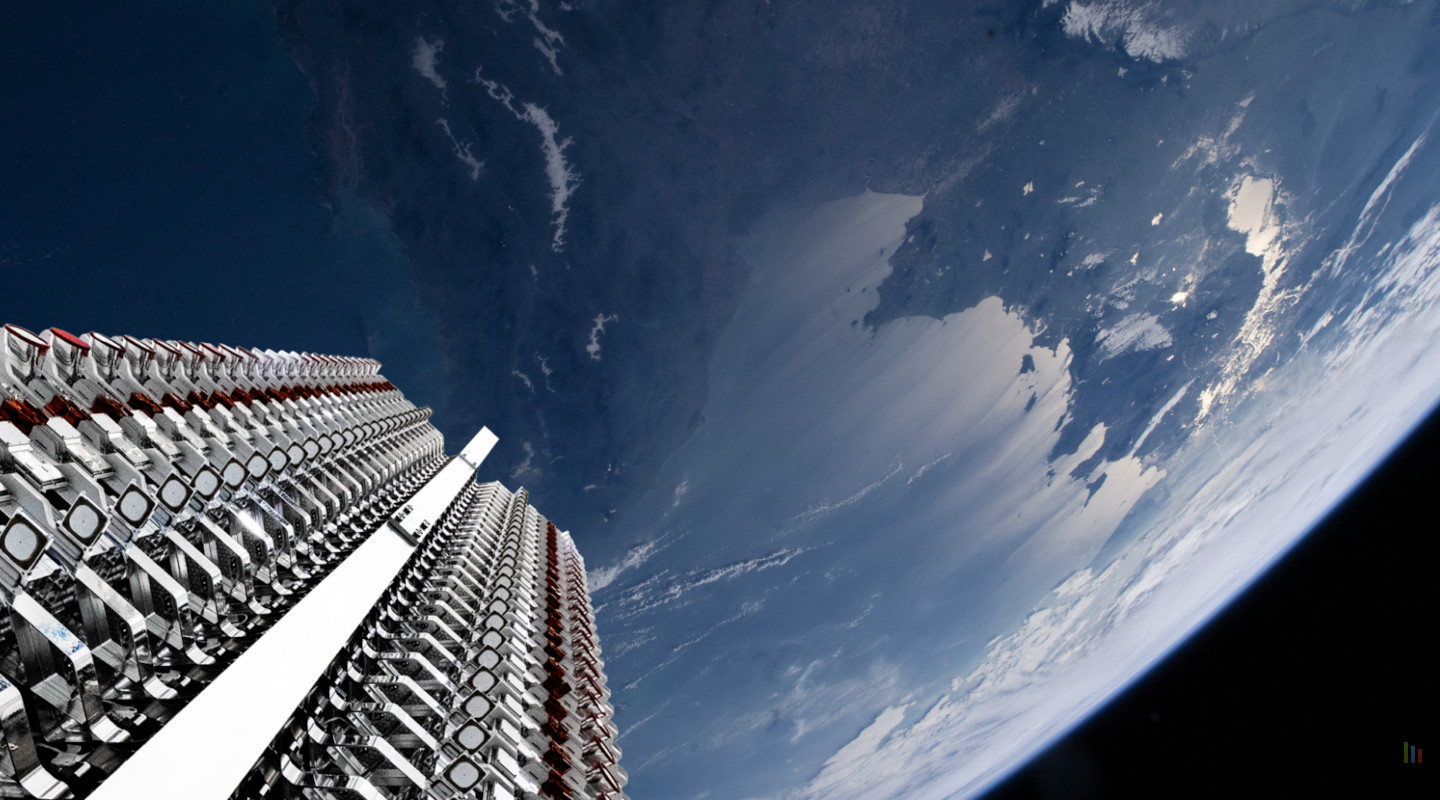
Face à la résilience de Starlink en Ukraine, des scientifiques chinois ont modélisé une contre-mesur

Dans le cadre de sa politique de réduction des déchets, le Sictom de la région de Rambouillet a inau

Les captures accidentelles de dauphins ont été réduites de 60 % pendant le mois de fermeture de la p

Près de 300 navires seront interdits de pêche durant un mois cet hiver et pour la troisième année co

Polyvalent, intelligent et incroyablement efficace, le Tineco Floor One S5 fait partie des appareils

À Rennes, l'arrestation d'un homme impliqué dans une série de vols de vélos et de trottinettes met f

Jérôme et Lucile viennent de devenir parents d'un troisième enfant. Ils partagent d'adorables photos

Banque Populaire, Crédit Agricole, Caisse d'Epargne, Banque Postale... Qui propose les tarifs les pl

L'explosion remonte au 8 octobre 2022. Elle a été par la suite revendiquée par Kiev.

La commune de Piré-Chancé, en Ille-et-Vilaine, a été le théâtre d'un drame survenu dans la matinée d

Figure montante du stand-up en France, Jason Brokerss débarque à Nevers pour le festival Drôle de Lo

Le Stade Toulousain est la victime d'un site frauduleux qui usurpe son identité visuelle afin de pié
Les travaux lancés entre Villequier et Caudebec depuis le début du mois de novembre 2025 visent à st

La scène se déroule à Kharkiv, deuxième ville d'Ukraine, exposée quotidiennement aux attaques aérien

Le nouveau cahier du rapport annuel de Myria "La migration en chiffres et en droits 2025", axé sur l
DANS LES ARCHIVES - En ce mois de mai 1981, lors de la San Isidro de Madrid, César Rincón dévoile to

Un feu de garage qui s'est déclaré chez un particulier a nécessité l'intervention des secours à Bara

Née en 1986 au coeur des quartiers nord de Marseille, l'association Schebba vient en aide aux femmes

Grâce au programme Vélo égaux, des adultes héraultais apprennent ou réapprennent gratuitement à fair

Douze hommes et femmes issus de la société civile s'apprêtent à rejoindre la réserve opérationnelle

Ce jeudi 27 novembre, la présentation du budget britannique faite par Rachel Reeves a été décryptée

En quinze ans, le territoire de Loudéac communauté a vu son territoire se recouvrir de méthaniseurs,

Ce ressortissant afghan comptait dans les rangs de l'armée afghane qui luttaient contre les Talibans

Après une grosse semaine de repos, les rugbymen du CAB sont de retour sur les terrains ce jeudi. Ils

Ce mercredi 26 novembre, des représentants de la filière bovine de Charente-Maritime ont participé à

Du 24 au 28 septembre la Force d'action rapide nucléaire (Farn) réalise un exercice à la centrale nu

L'Encan n'est pas n'importe quel bâtiment : de 1950 à 1994, il a été la criée officielle de La Roche

Les chanoinesses de la Mère de Dieu à Azille lancent une opération de vente de miels et de sirops en

Les chevilles ouvrières de ce projet comptent sur la mobilisation des agriculteurs à la recherche de
Directrice régionale Nouvelle-Aquitaine de la Banque de France, Marie-Agnès de Montbron explique les

La Toulouse Fashion Week, événement unique en France, va faire son show ces 28 et 29 novembre à la s

Malgré leur condamnation en Creuse pour ne pas avoir demandé l'autorisation d'instruire leurs sept e

Malgré leur condamnation en Creuse pour ne pas avoir demandé l'autorisation d'instruire leurs sept e

Un officier a signé un contrat de cinq ans avec l'Armée de Terre à Périgueux (Dordogne), ce mardi 25
C'est un cri du coeur, et un cri d'alarme. Celui d'une élue bretonne, enracinée, qui voit l'église d

Seagate vient de franchir une étape importante avec un prototype de disque dur exploitant la technol

Ce mercredi au tribunal correctionnel de Châlons-en-Champagne, le parquet a requis un an de prison f

Ce mercredi 26 novembre, BFMTV consacre une nouvelle émission qui donne la parole aux Français. Imp

Ce mercredi 26 novembre, BFMTV consacre une nouvelle émission qui donne la parole aux Français. Imp

Mené 1-0 puis 2-1, le PSG s'est fait peur avant d'achever (5-3) Tottenham grâce à un triplé de Vitin
Le Fonds monétaire international s'engage à soutenir l'économie ukrainienne avec un plan d'aide plur

Une jeune fille de 12 ans est portée disparue depuis le début d'après-midi ce mercredi 26 novembre à

Porter ou ne pas porter de pyjama à l'aéroport ? Telle est désormais la question qui agite les États

Déchaînée face aux Danois, la star des Bleus et du Real s'est offert une performance inédite.

Ce mercredi 26 novembre, BFMTV consacre une nouvelle émission qui donne la parole aux Français. Imp

Après avoie été acquitté en 2023 des charges d'agressions sexuelles portées contre lui par quatre ho

La trottinette électrique Ausom L1 fait partie des modèles les plus robustes et endurants du marché,
Ce mercredi soir, le Paris Saint-Germain affronte Tottenham dans le cadre de la 5e journée de la pha
DANS LES ARCHIVES - Le 26 novembre 1956, un chalutier de Concarneau (Finistère), « La-Gavotte », qui
Dans la nuit du 21 au 22 novembre 2025, un homme, né en 1968, est décédé des suites de ses blessures
Quatre personnes ont été mises en examen, dont trois placées en détention provisoire. La fondatrice

Depuis plusieurs années, notamment depuis l'invasion de l'Ukraine, la Russie espionne la France. Qua

Estimant avoir été licencié abusivement, un cadre de l'entreprise a intenté une action en justice et

